Lego Mind Storm Robotic Arm
Objective:
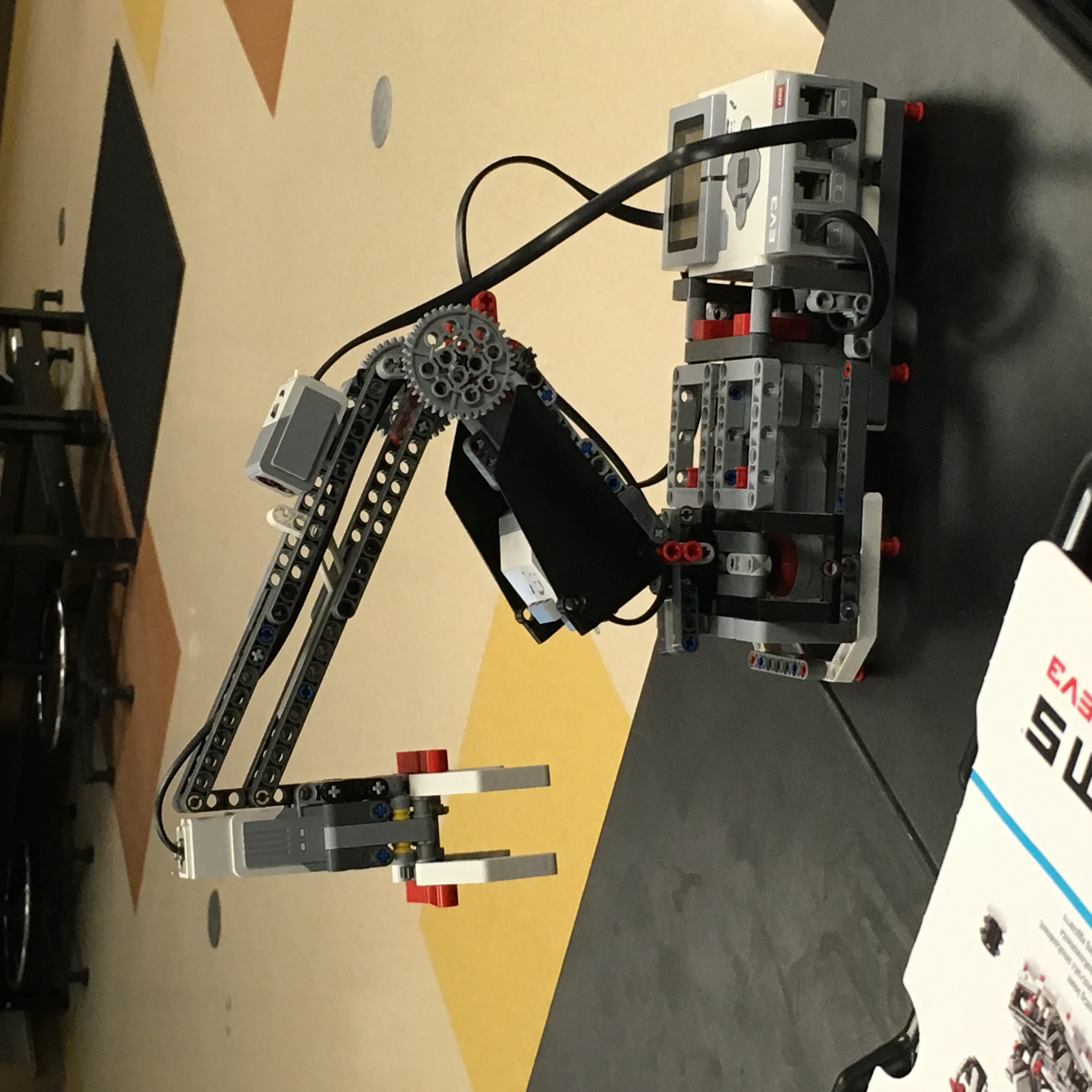
To Design and build an animated robot programmed to be controlled wirelessly
Overview:
This project was completed with myself and my partner, Darren Malcolm (pictured above). We were tasked to build a robot for our term project, using a Lego Mindstorm EV3 Kit. Our initial timespand of receiving the project started from mid-late February. Once deciding which robot we were going to use, we started the research and assembly process. Being my interest being in mechanical engineering, and my partner's in computer, I naturally took lead of the build process which my partner completed a bulk of programming requirements. This project took roughly three weeks, with consistant effort, to build; and two weeks of testing different features upon programming.
Problems:
Despite receiving a full kit, there were a multitude of parts missing. The professor, Arthur Garcia, allowed teams to utilize additional parts from a spare parts box comprised of an unusable "brain".
Process:
Once the robots' assembly process was completed, Darren finalized the programming process. Although programming had commenced and completed an initial draft before the build process had completed, several tests lead us to reprogram in leui of former code to configure movement properly. The group downloaded the lego mindstorm commander app from the Apple App Store onto our iPhones; and we were able to control movement of the robotic arm. The robot's movement can move its arm to ascend and descend, rotate in a circular motion, and grabble small objects. We were able to accomplish our objective of picking up three - two cubic inch blocks, and displace them on either side of the robot.